Home
Publications
Projects
CV
Light
Dark
Automatic
Reinforcement Learning
DMAR: Decentralized Multi-agent Rollout Algorithm
A new decentralized and online reinforcement learning algorithm for vehicle routing problem in unmapped environments
Jamison Weber
,
Dhanush Giriyan
,
Devendra R. Parkar
,
Andréa Richa
,
Dimitri Bertsekas
PDF
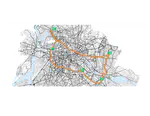
IARPA HAYSTACK - Anamoly Detection
Our team at LabV2(ASU) [collaboration with Leidos Inc.] works on modeling agent movements in real-world maps. We use knowledge graphs to model the maps in combination with symbolic rule learning and heuristic based graph traversal algorithms to model and learn agent trajectories(both anamolous and normal).
PDF
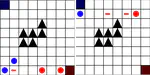
PyReason-Gym: Symbolic logic simulator for Reinforcement Learning
A temporal and annotated-logic based simulation proxy that enables interpretable reinforcement learning
Kaustuv Mukherji
,
Devendra R. Parkar
,
Lahari Pokala
,
Dyuman Aditya
,
Paulo Shakarian
,
Clark Dorman
PDF
Code
Distributed Online Rollout for Multivehicle Routing in Unmapped Environments
We propose a new decentralized and online reinforcement learning algorithm for vehicle routing in a more challenging unmapped environments with provable guarantees of cost improvements over greedy base policy.
[International Conference on Autonomous Agents and Multiagent Systems (AAMAS 2024)]
Jamison Weber
,
Dhanush Giriyan
,
Devendra R. Parkar
,
Andréa Richa
,
Dimitri Bertsekas
Project
DOI
Scalable Semantic Non-Markovian Simulation Proxy for Reinforcement Learning [In Press]
A temporal and annotated-logic based simulation proxy that enables interpretable reinforcement learning
[International Conference on Semantic Computing (ICSC 2024)]
Kaustuv Mukherji
,
Devendra R. Parkar
,
Lahari Pokala
,
Dyuman Aditya
,
Paulo Shakarian
,
Clark Dorman
Project
Video
DOI
Cite
×


![Scalable Semantic Non-Markovian Simulation Proxy for Reinforcement Learning [In Press]](/publication/pyr-gym-rl/featured_hucde188c3b556efef478396786c8a4bbf_115496_150x0_resize_q75_h2_lanczos_3.webp)