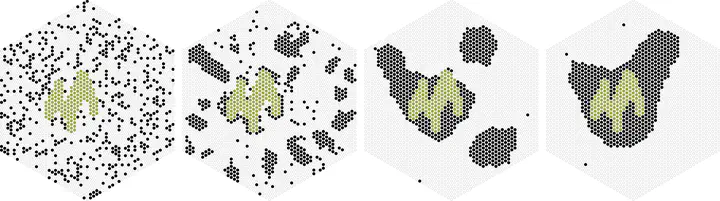
 Object Coating timelapse
Object Coating timelapseCan we automate the process of finding algorithms that can induce global behaviors in a collective of particles? This research project that I started with Kirtus Leyba and Prof. Joshua Daymude aims to answer this question.
We are using the Self-organizing particle systems(SOPS) model developed at SOPS Lab(ASU) to study distributed collective algorithms. It consists of individual, homogeneous computational elements called particles which move along the vertices of a triangular lattice structure. The algorithms we develop are stochastic in nature and encode markov-chains that govern the movements of the particles. These algorithms only rely on local information available to the particles and operate in distributed paradigm.
For optimizing and searching for solution algorithms Genetic Algorithms are used. Genetic Algorithms provide for a heuristic based optimization which can balance out exploration and exploitation. We need such robustness and flexibility in optimization since we require our solution algorithms to be agnostic to the number of particles and also find multiple solutions if they exist.
Devendra R. Parkar
Research Assistant
My broad research interests include complex systems, distributed systems and learning theory